Introduction and motivation
The Mobile Internet enables to connect devices and people for exchanging voice and multimedia data anytime anywhere. The Internet of Things (IoT) connects machines, or items, to expand their effectiveness by exploiting the capability of networking. Currently, the fifth generation of mobile networks is discussed among researchers and technology specialists. One of the major aspects of 5G is low-latency communications and real-time control of devices. This future wave of innovation will pave the way to the Tactile Internet. Very low latency in conjunction with ultrahigh reliability as well as unwavering quality and security will characterize the Tactile Internet [1]. A revolution is soon to happen, once the latency (round-trip delay) of communication devices will be approximately 1 ms. The Tactile Internet will enable an unforeseeable variety of new applications. It will empower people and machines to collaborate with their surroundings, whereby users may be mobile. The Tactile Internet will turn into a major driving force for economies and will be the platform for the control and monitoring of real and virtual objects [2]. The main motivation behind the Tactile Internet is to develop architectures and enable low-latency end-to-end communications to render this vision realistic. One of the possible tactile applications that require low latency is remote driving. Another application is using robots in hospitals for critical surgery or coal mining operation. Tactile latencies allow wireless infrastructures to help drive and control devices or objects remotely [1][3]. Fig. 1 shows the components of an end-to-end Tactile Internet system in greater detail.
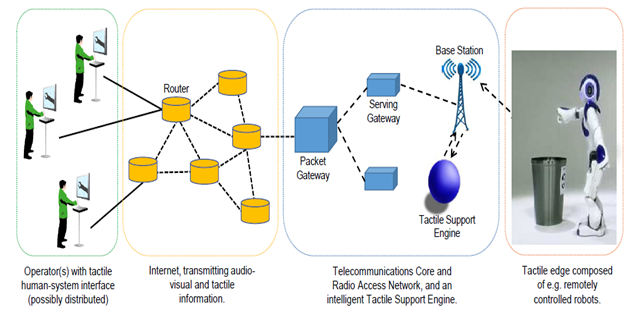
Fig. 1. End-to-end system components of Tactile Internet [4].
Impact on Economy
The Tactile Internet is a prospective quantum leap for the worldwide economy. A preparatory business sector examination has uncovered that the potential business sector could stretch out to US$20 trillion around the world – around 20% of today's overall GDP [5]. Moving towards a round-trip latency of 1 ms (envisioned for 5G) along with ultrahigh reliability and availability opens up tactile applications based on control communications. For comparison, the available peak data rate and latency of several legacy and current technologies are shown in Table 1.
| Technology |
Peak Data Rate |
Latency |
| GPRS |
114 kbps |
∼ 500 ms |
| EDGE |
236.8 kbps |
∼ 250 ms |
W-CDMA |
384 kbps |
∼ 200 ms |
HSPA |
2 Mbps |
∼ 150 ms |
HSPA |
42 Mbps |
∼ 70 ms |
LTE |
300 Mbps |
∼ 30 ms |
LTE-A |
1 Gbps |
∼ 20 ms |
Comparison of peak data rate and latency [5]
Challenges
The Tactile Internet relies on the best conceivable reaction time, accessibility, dependability, and security. These objectives must be achieved by means of distributed service platform architectures. The requirement of very low end-to-end latency incurs that tactile applications should be realized in locally available systems, near the clients [1]. Fig. 2 shows the various latency components of a typical Tactile Internet system.
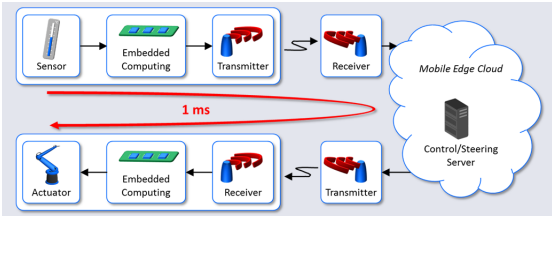
Fig. 2. Latency components of Tactile Internet system [1].
A fundamental challenge of the Tactile Internet is to design an effective architecture or platform for this vision. The design of haptic encoders and reduction of the TCP/IP protocol stack latency will also play a role in enabling this technology [5]. Clearly, achieving a round-trip delay of 1 ms is an enormous challenge [2]. In the following, we highlight some open issues that need to be addressed for enabling the Tactile Internet.
Reducing Latency to Milliseconds
5G researchers aim at achieving a round-trip latency of 1 ms. For reducing latency, we need to take action along three axes [6]:
- Provide an adequate spectrum resource and access framework to empower delay-sensitive tactile applications. Develop efficient medium access mechanisms that can reduce packet processing hops and signaling overhead. Small frames (TTIs) and instant access mechanisms will enable this vision.
- Enable content discovery and access mechanisms near the client and guarantee the quickest and shortest path.
- Real-time control and monitoring is necessary based on the network’s behavior/experience and the clients’ need.
Cloudlets
Numerous new applications will emerge as we move away from today's world to an era where applications will control real and virtual objects, as envisioned in the idea of the Tactile Internet. These tactile applications will be only effective if we will enable networks that can provide low latency for end-to-end communications. Locally available cloudlets represent a promising approach for enabling ubiquitous, low-latency, and on-demand network access [2]. But we also need to think about the feasibility of such locally available cloudlets for Tactile Internet services. By serving as proxies for remote clouds that may become unavailable because of failures or cyber attacks, cloudlets can enhance overall robustness and accessibility [7].
Medium Access Control
Today, latency basically depends on the operation of the medium access control (MAC) as well as signal processing delay of the physical layer [2]. Protocol processing will turn into a noteworthy test for making the Tactile Internet conceivable. Any packet arriving at a base station must be taken care of promptly. We need to allocate reserved MAC slots for that request. Another major challenge is to ensure carrier grade access reliability and robustness [2][8].
Fast Handoff
Clients can be versatile or mobile, requiring a handoff of the correspondence link(s) starting with one base station onto the next one. Subsequently, in addition to communication handoff, the equipment and programming framework running on nearby servers should allow for a handoff of a running application from one server at one base station area to the next one [1].
Network Coding
One of the most important challenges is ensuring security of Tactile Internet applications. These tactile applications can bring about incredible damage if not working properly. The Tactile Internet must be extremely secure and safe [1]. Suitable network coding procedures will guarantee that only authentic receivers are able to process safe messages and reduce packet retransmissions [9]. Another important challenge of the Tactile Internet will be the recognizable proof of clients, or terminal devices to be more specific. The current techniques for isolating validation or authentication and physical transmission do not consider low end-to-end latency.
Robotics
We may be on the verge of a new era, where robots allow us to see, hear, touch, and manipulate objects in places where we are not physically present. Researchers believe that advances in robotics and 5G will lead to transferring not only data but also manual skills through the Internet [2][4]. Robotics is the fastest developing and most exceptional innovation utilized as a part of education and research.
In previous years, the specialized capabilities of robotics have been exhibited in different areas, including healthcare, autonomous driving, industry work, personal assistance, and automation [2]. Their potential does not come without unpredictability, though different competitions and challenges have exhibited the impediments of this innovation. The better machines can substitute for human workers, the more likely it is that they will drive down the wages of humans with similar skills [10]. Robots can be a valuable solution for dangerous applications and human assistive work such as tele-diagnosis, surgery, remote driving, and so forth. Domestic robots can provide numerous advantages like floor cleaning, shopping, or light/fan control. The Tactile Internet will enable such control and low latency for future robot applications. The principle difficulties of tele-operated robots are the network reliability and communications delay [11]. The present main challenge is that even if the connection to the cloud is degraded, a robot still needs to present essential usefulness [12][13]. Toward this end, we need to solve the bandwidth and task allocation latency efficiently [14]. Stand-alone robots have some disadvantages compared to networked robots with regard to reliable sensing or single/multiple task completion [11]. Resource allocation solutions should be able to handle cases of resource starvation [15]. Another challenge is to empower robots to rapidly sense and respond to their surroundings [16].
Radio Access Technology (RAT) Selection
One of the open challenges is to develop a radio access technology (RAT) selection technique that jointly improves network performance and user experience, while at the same time reducing signaling and processing overhead [17].
Research directions
In this research project, we study several key research challenges related to the Tactile Internet vision. Our focus is mainly on low-latency communications with remotely controlled robots. Toward this end, we use a NAO humanoid robot in our Optical Zeitgeist Laboratory. Fig. 3 shows some of the salient features of NAO. In the following, we first highlight some functionalities of NAO. Next, we outline the major research directions of our project.
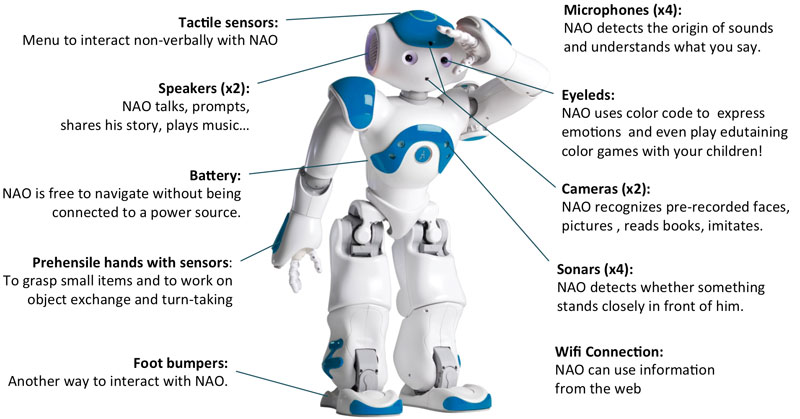
Fig. 3. NAO humanoid robot.
NAO Functionalities
NAO is a 58-cm tall humanoid robot. NAO is equipped with sensors, motors and its software is driven by its dedicated operating system NAOqi. Choregraphe and other advanced programming software makes movement libraries available. NAO is intended to be a friendly companion around the house. He moves, recognizes you, hears you, and even talks to you! NAO has the great capability to sense his environment. NAO is able to hear and recognize speech. He also recognizes object and says what it is. NAO can detect and learn a face in order to recognize it next time. He can also interact with humans, which is one of the best features of NAO. Other major features include walking, sitting, standing up, and dancing, among others.
The goal of our research efforts is to develop efficient protocols and architectures that help turn the Tactile Internet vision into reality. Our major research directions are as follows:
Design of Control Architectures for Tactile Internet and Analysis of Impact of Latency
For tactile low-latency communications we need to design and evaluate innovative and adaptive network architectures for Tactile Internet communication systems based on Mobile-Edge Computing (MEC) and cloudlets in support of tactile applications.
Development of Efficient Radio Access Mechanisms for Ultrahigh Reliability and Very Low Latency Communications
The development of robust radio access networks can give prompt access to tactile users and satisfy given end-to-end round-trip delay and resilience requirements. In order to achieve this, we need to design new architectures with decoupled control and data planes. Efficient radio access mechanisms will cover the following two basic aspects of Tactile Internet users:
- Development of low latency aware MAC protocols for tactile users. The medium access con¬trol should allow for immediate access to meet the low latency requirement of Tactile Internet applications. Appropriate access schemes need to be developed such that collisions can be minimized.
- Optimization of radio access technology selection for Tactile Internet users.
Simplified Task and Bandwidth Allocation for Scalable Robot Networks
Automated robotic services supporting daily works will become a basic component of our lives, though accidents or failures must be avoided. In robot networks, due to the lack of coordination across the devices, resources may be wasted due to collisions or back-offs, which in turn cause delays in task completion. To cope with failures and render the system more energy-efficient and delay-aware, robot networks need assistance from other robots. That’s why we will develop smart task allocation and bandwidth allocation strategies for robot networks in order to improve system performance. This task has the following goals:
- Development of efficient resource allocation schemes in robot networks to enhance the performance of bandwidth allocation for delay-sensitive cloud operations.
- Design and verification of efficient task allocation strategies among robots for efficient allocation of tasks among them and determine the optimal ratio of online and offline computation.
Analytical Model, Simulation, and Proof-of-concept Demonstration
We will develop an analytical framework to derive key performance measures for robot networks. We also provide verifying simulation results for our analysis and compare the analytical and simulation performance results with proof-of-concept demonstrations.
Researchers
Graduate Student
Advisors
Publications
- A. Ebrahimzadeh, M. Chowdhury, and M. Maier,
“The Tactile Internet over 5G FiWi Architectures,”
Wiley, "Optical and Wireless Convergence for 5G Networks and Beyond," to appear
- M. Chowdhury and M. Maier,
“Human-Agent-Robot Teamwork (HART) Over FiWi-Based Tactile Internet Infrastructures,”
Hershey, PA: IGI Global, "Encyclopedia of Information Science and Technology, Fifth Edition," pp. 27-41, Sept. 2020
- M. Chowdhury and M. Maier,
“Toward Dynamic HART-Centric Task Offloading over FiWi Infrastructures in the Tactile Internet Era,”
IEEE Communications Magazine, vol. 57, no. 11, pp. 123-128, Nov. 2019
- M. Chowdhury and M. Maier,
“User Preference Aware Task Coordination and Proactive Bandwidth Allocation in a FiWi Based Human-Agent-Robot Teamwork Ecosystem,”
IEEE Transactions on Network and Service Management, vol. 16, no. 1, pp. 84-97, Mar. 2019
- M. Maier, A. Ebrahimzadeh, and M. Chowdhury,
“The Tactile Internet: Automation or Augmentation of the Human?,”
IEEE Access, vol. 6, pp. 41607-41618, July 2018
- M. Chowdhury and M. Maier,
“Local and Non-Local Human-to-Robot Task Allocation in Fiber-Wireless Multi-Robot Networks,”
IEEE Systems Journal, vol. 12, no. 3, pp. 2250-2260, Sept. 2018
- M. Chowdhury, E. Steinbach, W. Kellerer, and M. Maier,
“Context-Aware Task Migration for HART-Centric Collaboration over FiWi Based Tactile Internet Infrastructures,”
IEEE Transactions on Parallel and Distributed Systems, vol. 29, no. 6, pp. 1231-1246, Jun. 2018
- M. Chowdhury and M. Maier,
“Collaborative Computing for Advanced Tactile Internet Human-to-Robot (H2R) Communications in Integrated FiWi Multi-Robot Infrastructures,”
IEEE Internet of Things Journal, , vol. 4, no. 6, pp. 2142-2158, Dec. 2017
- M. Maier, M. Chowdhury, B. P. Rimal, and D. Pham Van,
“The Tactile Internet: Vision, Recent Progress, and Open Challenges,”
IEEE Communications Magazine, vol. 54, no. 5, pp. 138-145, May 2016
- H. Beyranvand, M. Lévesque, M. Maier, J. A. Salehi, C. Verikoukis, and D. Tipper,
“Toward 5G: FiWi Enhanced LTE-A HetNets with Reliable Low-Latency Fiber Backhaul Sharing and WiFi Offloading,”
IEEE/ACM Transactions on Networking, vol. 25, no. 2, pp. 690-707, Apr. 2017
References
[1]
|
ITU-T Technology Watch Report: The Tactile Internet, August 2014.
|
[2]
|
G. Fettweis, “The Tactile Internet: Applications and Challenges,” IEEE Vehicular Technology Magazine, vol. 9, no. 1, pp. 64-70, March 2014.
|
[3]
|
G. Fettweis and S. Alamouti, “5G: Personal mobile internet beyond what cellular did to telephony,” IEEE CommunicationMagazine, vol. 52, no. 2, pp. 140-145, Feb. 2014.
|
[4]
|
M. Dohler, “The Tactile Internet – IoT, 5G and cloud on steroids,” IET 5G Radio Technology Seminar, March 2015.
|
[5]
|
A. Aijaz, M. Dohler, and A. Aghvami, “The Tactile Internet,” King’s College London, Presentation slides on stakeholders, ofcom, UK, 2015.
|
[6]
|
W. Mohr, “Future mobile and wireless communications towards 2020 (5G),” Nokia Solutions and Networks (white paper), May 2013.
|
[7]
|
M. Satyanarayanan et al., “An open ecosystem for mobile-cloud convergence,” IEEE Communications Magazine, vol. 53, no. 3, pp. 63-70, March 2015.
|
[8]
|
E. Dahlman et al., “5G radio access,” Ericsson review, June 2014.
|
[9]
|
D. Szabo, A. Gulyas, F. Fitzek, and D. Lucani, “Towards the Tactile Internet: Decreasing Communication Latency with Network Coding and Software Defined Networking,” IEEE European Wireless Conference, May 2015.
|
[10]
|
E. Brynjolfsson and A. Mcafee, “The Second Machine Age: Work, Progress, and Prosperity in a Time of Brilliant Technologies,” W. W. Norton and Company, Jan. 2014.
|
[11]
|
S. Jordán, T. Haidegger, L. Kovács, I. Felde, and I. Rudas, “The rising prospects of cloud robotic applications”, Proc., IEEE International conference on Computational Cybernetics, pp. 327-332, July 2013.
|
[12]
|
G. Hu, W. P. Tay, and Y. Wen, “Cloud robotics: architecture, challenges and applications,” IEEE Network, vol. 26, no. 3, pp. 21–28, May/June 2012.
|
[13]
|
B. Dhiyanesh, “Dynamic resource allocation for machine to cloud communications robotics cloud,” Proc., IEEE International Conference on Emerging Trends in Electrical Engineering and Energy Management (ICETEEEM), pp. 451-454, Dec. 2012.
|
[14]
|
F. Teng and F. Magoules, “A New Game Theoretical Resource Allocation Algorithm for Cloud Computing,” Lecture Notes in Computer Science, Springer Berlin / Heidelberg, Advances in Grid and Pervasive Computing, pp. 321-330, 2010.
|
[15]
|
K. Kamei, S. Nishio, and N. Hagita, “Cloud networked robotics,” IEEE Network, vol. 26, no. 3, pp. 28-34, June 2012.
|
[16]
|
B. Gates, “A Robot in Every Home,” Scientific American, pp. 58-65, Jan. 2007.
|
[17]
|
M. Helou, M. Ibrahim, S. Lahoud, K. Khawam, D. Mezher, and B. Cousin, “A Network-Assisted Approach for RAT Selection in Heterogeneous Cellular Networks,” IEEE Journal on Selected Areas in Communication, vol. 33, no. 6, pp. 1055-1067, June 2015.
|
|